1 – History of Dynamic Compaction
An alternative to soil densification by Vibro Compaction is densification by a falling weight. This method is named “Deep Dynamic Compaction (DDC). In strict use of technical terminology, the system should actually be called Surface Impact Compaction rather than Deep Dynamic Compaction, since the energy is not introduced at depth but at the surface and the introduction of the energy is by transient impact waves and not by stationary dynamic waves from a constantly vibrating source.
2 – Treatment depth
Opposite to the Vibro Compaction method, the compaction effect for DC decreases with depth. This is evidently clear from the fact that the energy is transferred in a completely different manner. While the vibroprobe penetrates to the required depth of compaction and creates a compacting vibration in every 0.5 m or 1.0 m interval of the soil profile, the falling weight has to transfer all energy from the surface downwards. Since the geometrical dimensions of a falling weight are limited to a few meters in width, the depth effect of compaction is also limited.
For economically feasible weight dimension of up to 30 tons, the maximum depth of compac-tion influence lies in the range of 7 m to 10 m. The resistance of the soil skeleton to the weight impact is unknown before testing.
In order to have a first estimation for the required compaction effort using the DC method the following two methods are available:
1) Empirical formula Z = Fehler
2) Menard formula Z = n√MH with
Z = required treatment depth [m]M = tamping mass [Tons]B = plan dimensions of tamper [m]K = constant (soil dependent)
n = constant (mainly soil dependent)
H = falling heights [m]
For a 15 ton weight and gravely sandy soil, the following may be exemplary assumed:
B = 2.0 m, M = 15 to, K = 0.13, n = 0.5
For a 8 ton weight the following changes: M = 8 ton, B = 1.8 m
In Lukas (1986) a depth limitation is proposed as follows:
“The maximum capacity cranes normally available are rated as 150 to 175 tons (136 to 158 t) and these size cranes can lift weights up to 20 to 22 tons (18.1 to 20 t) with a maximum drop height of about 66 to 98 ft (20 to 30 m). Using an average n value of 0dynamic_compaction_3_.5, a maximum depth of improvement in the range of 33 to 39 ft (10 to 12 m) can be achieved.” The left figure is from an unpublished internal report on a site in Taiwan, where Vibro Compaction and DC have worked on the same testing field. The soil profile consisted of a silty sand to sandy silt. The falling weight had 25 tons and was dropped from a height of 20 m.
3 – Correlation of impact energy with increase in CPT resistance
As for Vibro Compaction, for Dynamic Compaction treated ground the design is rather straightforward. One simply calculates settlement and stability of the treated ground applying the same standard textbook theories of foundation engineering like for any ground that has NOT been treated. The important difference is that for the soil strength and stiffness, the new (improved) parameters are inserted in the equations.
The art of designing Vibro Compaction and DC lies therefore in the correct estimation of post-treatment soil parameters and not in the application of any proprietary or otherwise complex calculation scheme. The following figure shows what degree of compaction (correlated with CPT resistance) can be reasonably expected from a clean sand improved by DC in function of the applied energy. The energy in the below figure is given in tm / m2. This means the total meters that a weight of x tons has been dropped per square meter of treated area of soil.
Example: To apply a specific energy of 200 mt/m2 ,which would give a CPT resistance of 10 MPa (=100 kg/cm2) according to the below figure, a 20 ton weight dropped 20 m has to be lifted and dropped 0.5 times per square meter.
If the smallest grid in which DC is executed is for example 5 x 5 m = 20 m2, that would mean the weight has to be lifted and dropped 10 times at each drop location.
Achievable CPT tip resistance in function of applied compaction
energy, after Mitchell (2005)
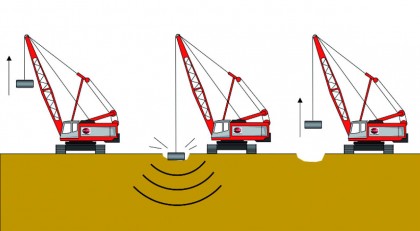
The weight is dropped in an elaborate sequence of primary, secondary and sometimes tertiary grid, followed sometimes by a so called “ironing path” where a smaller weight with a larger width is dropped from a small height to compact only the top 3 m. The following sketch shows the DC rig working in a primary (1) and secondary (2) path.



4 – Limitations to the use of DC as compared to Vibro Compaction
4.1 Shock waves
The DC method creates shock waves, which travel rather far because of their low frequency. This makes this system pro-hi-bitive in cities and closer than approx. 40 m from ex-isting structu-res such as oil tanks, pipe-lines, caissons and buil-dings of all kind. The Vibro Compaction process also creates waves in the soil, but since the energy is applied not in singu-lar impacts on the surface but by a constant vibration within the soil mass, the created waves are much smaller. A vibroprobe can therefore also be used near existing structures and in cities.
4.2 Cohesive soil layers above compactable soils
If there is a silty or clayey soil above the compactable sands and gravels, the DC method is not able to compact the underlying soils, because the impact energy is absorbed largely by the soft cohesive soil on the top.
The shear waves which are more important for compaction than the compression waves, are damped away in the cohesive layer and do not sufficiently reach the underlying compactable layers.
In the Vibro Compaction method, the shear waves are created in-depth by the vibroprobe. Thereby it is assured, that each individual soil layer is compacted independent of the structure and pro-perties of any soils above this layer.
4.3 Homogeneity of compaction
The Vibro Compaction method is carried out in compaction steps of 0.5 m to 1.0 m from the bottom of the required depth upward to the surface. During the work, the pulling criteria (xx Amps, or yy seconds, whichever comes first) are obeyed. These pulling criteria assure that looser or less op-timally compactable sub layers are compacted by a longer vibratory action than better compactable sub layers.
Thus, not only a general compaction but also a maximum homogeneity within the compaction is achieved, which in turn leads to smaller differential settlements.
The DC method cannot treat 0.5 m soil intervals individually, since all energy is applied from the soil surface. The desired homogenization of the soil density over depth is therefore less effectively achieved with the DC method than with Vibro Compaction.
4.4 Offshore works
DC cannot be operated cost efficiently under water, while the Vibro Compaction method is used very successfully under water.
The last remaining problem of under water compaction is that the settlement behavior of the ground surface during compaction cannot be observed. Consequently, for under water compaction, one has to rely entirely on Post-CPT tests for the establishment of the correct pulling criteria and not on the amount of sand feeding one observes on the surface.